[menuju akhir]
RANGKAIAN PINTU OTOMATIS DENGAN GERBANG LOGIKA





 = jumlah inverters
= jumlah inverters = propagation delay per gate
= propagation delay per gate







1. Tujuan [kembali]
- Dapat merangkai dan menjelaskan prinsip kerja rangkaian pintu otomatis dengan gerbang logika
2. Pembahasan [kembali]
IC L293D adlah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC.
Konstruksi pin driver motor DC IC l293D adalah sebagai berikut.
 Fungsi Pin Driver Motor DC IC L293D
Fungsi Pin Driver Motor DC IC L293D
- IC L293D
IC L293D adlah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC.
Konstruksi pin driver motor DC IC l293D adalah sebagai berikut.
- Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
- Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC
- Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC
- Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
- Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
- OR Gate
Gerbang
OR memerlukan 2 atau lebih Masukan (Input) untuk menghasilkan hanya 1 Keluaran
(Output). Gerbang OR akan menghasilkan Keluaran (Output) 1 jika salah satu dari
Masukan (Input) bernilai Logika 1 dan jika ingin menghasilkan Keluaran (Output)
Logika 0, maka semua Masukan (Input) harus bernilai Logika 0. Simbol yang
menandakan Operasi Logika OR adalah tanda Plus (“+”). Contohnya : Z = X + Y.
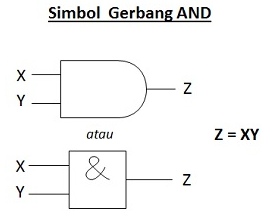
- AND Gate
Gerbang AND memerlukan 2 atau lebih Masukan
(Input) untuk menghasilkan hanya 1 Keluaran (Output). Gerbang AND akan
menghasilkan Keluaran (Output) Logika 1 jika semua masukan (Input) bernilai
Logika 1 dan akan menghasilkan Keluaran (Output) Logika 0 jika salah satu dari
masukan (Input) bernilai Logika 0. Simbol yang menandakan Operasi Gerbang Logika
AND adalah tanda titik (“.”) atau tidak memakai tanda sama sekali. Contohnya :
Z = X.Y atau Z = XY.
- INVERTER
Inverter atau Gerbang NOT hanya memerlukan sebuah Masukan (Input) untuk menghasilkan hanya 1 Keluaran (Output). Gerbang NOT disebut juga dengan Inverter (Pembalik) karena menghasilkan Keluaran (Output) yang berlawanan (kebalikan) dengan Masukan atau Inputnya. Berarti jika kita ingin mendapatkan Keluaran (Output) dengan nilai Logika 0 maka Input atau Masukannya harus bernilai Logika 1. Gerbang NOT biasanya dilambangkan dengan simbol minus (“-“) di atas Variabel Inputnya.
CMOS inverter digunakan untuk membuat square-wave oscillators yang menghasilkan clock signals. Generator clock ini memberikan stabilitas yang baik, beroperasi di atas kisaran tegangan pasokan yang luas (3-15 V) dan jangkauan frekuensi (1 Hz hingga lebih dari 15 MHz), konsumsi tegangan yang rendah dan penghubung yang mudah ke logic families yang lain.
Sirkuit yang paling dasar adalah bentuk cincin, yaitu inverter. Gambar menunjukkan satu sirkuit menggunakan tiga inverters. Inverting gate seperti NAND dan NOR juga dapat digunakan sebagai gantinya. Konfigurasi ini membuat sirkuit osilator tidak praktis, frekuensi osilasi sangat rentan terhadap perubahan suhu, tegangan pasokan, dan pemuatan eksternal. Frekuensi osilasi dapat dinyatakan dalam persamaan:
dimana:
Gambar 3 (a) memperlihatkan sebuah sirkuit osilator praktis. Frekuensi osilasinya dapat dinyatakan dalam persamaan:
dimana:
Gambar 3 (b) memperlihatkan sirkuit lain yang menggunakan dua inverter pengganti atau tiga inverter. Frekuensi osilasinya dapat dinyatakan dalam persamaan:
Sirkuit pada gambar 3 tidak sensitif terhadap variasi tegangan pasokan. Gambar 4 menunjukkan sirkuit lain yang terkonfigurasi di sekitar schmitt inverter tunggal. Kapasitor mengisi (ketika output tinggi) dan tidak mengisi (ketika output rendah) di antara dua tegangan ambang. Namun, frekuensi osilasi peka terhadap variasi tegangan pasokan. Dapat dinyatakan dalam persamaan:
Gambar 5 menunjukkan konfigurasi osilator kristal di sekitar inverter tunggal sebagai elemen aktif. Jumlah inverter yang lebih besar membatasi frekuensi getaran tertinggi yang dapat dicapai dengan nilai yang lebih rendah.
Tabel Gerbang Logika
Tabel Gerbang Logika
3. Komponen [kembali]







- IC L293D
sebagai penguat arus dengan mengambil sinyal kontrol arus rendah dan memberikan output ke sinyal kontrol arus yang lebih tinggi. Sinyal arus yang lebih tinggi ini lah yang digunakan untuk menggerakkan motor.
- MOTOR DC
sebagai alat penggerak mesin pintu otomatis

- Battey
Baterai merupakan suatu komponen elektronika yang digunakan sebagai sumber tegangan pada rangkaian
- OR Gate

- AND Gate

- INVERTER
Power Inverter atau biasanya disebut dengan Inverter adalah suatu rangkaian atau perangkat elektronika yang dapat mengubah arus listrik searah (DC) ke arus listrik bolak-balik (AC) pada tegangan dan frekuensi yang dibutuhkan sesuai dengan perancangan rangkaiannya.
- Logicstate
Logicstate berfungsi sebagai indikator logika 0 atau 1 pada rangkaian.
- Logicprobe
Logicprobe berfungsi sebagai indikator logika 0 atau 1 pada rangkaian.

4. Rangkaian [kembali]

Prinsip kerja :
Kondisi pertama yaitu motor MOTOR akan mentup ketika SENSOR BERAT 1 dan SENSOR BERAT 2 bernilai 0 dan SENSOR TUTUP bernilai 0, sedangkan SENSOR BUKA bisa bernilai 1 atau 0. MOTOR akan berhenti menutup ketika SENSOR TUTUP bernilai 1 yaitu ketika pintu sudah tertutup.
Kondisi kedua yaitu MOTOR akan membuka ketika salah satu SENSOR BERAT 1 atau SENSOR BERAT 2 bernilai 1 atau keduanya bernilai 1 dan SENSOR BUKA bernilai 0, sedangkan SENSOR TUTUP bisa bernilai 1 atau 0. MOTOR akan berhenti menutup ketika SENSOR BUKA bernilai 1 yaitu ketika pintu sudah terbuka
Tabel Kebenaran Rangkaian
6. Link Download [kembali]
{kind=link}
Tidak ada komentar:
Posting Komentar